




 Current Views: 1189060
Current Views: 1189060
 Current Downloads: 741161
Current Downloads: 741161
Education Study
ISSN Print:2707-0611
ISSN Online:2707-062X
Contact Editorial Office



Subscribe to the latest published information from SCISCAN
基于DBR的儿童早期自适应编程学习系统构建与实践成效分析
Development and Analysis of the Practical Outcomes of an Early Childhood Adaptive Programming Learning System Based on DBR


-
Information:
苏州科技大学教育学院,苏州
-
Keywords:
Adaptive learning system; Early childhood programming; DBR; Personalized learning自适应学习系统; 幼儿编程; DBR; 个性化学习
- Abstract: Existing programming tools for young children often have limitations in terms of age appropriateness and personalized learning support. This study adopts a Design-Based Research (DBR) paradigm to develop an intelligent adaptive programming learning system for children aged 5–8. The system underwent three rounds of iteration, gradually refining core functions such as rule-based adaptive prompts, a simple AI learning assistant, and a tiered difficulty adjustment mechanism. To validate the system’s effectiveness, a 6-week quasi-experimental study was conducted with 59 senior-kindergarten students from two kindergartens in Suzhou, comparing the teaching outcomes of this system with those of the traditional Scratch Jr. The findings revealed that the post-test programming proficiency of children in the experimental group was significantly higher than that of the control group and showed a sustained upward trend. Additionally, a significant positive correlation was observed between task difficulty levels and programming performance, providing empirical evidence for the effectiveness of the system’s difficulty-matching mechanism. Qualitative analysis further confirmed that the emotional scaffolding provided by the adaptive system effectively enhanced the children’s task persistence and emotional stability. 现有幼儿编程工具在适龄性和个性化学习支持方面往往存在局限。本研究以设计型研究(DBR)为范式,构建面向5~8岁儿童的智能适应性编程学习系统。系统历经三轮迭代,逐步完善基于规则的自适应提示、简易AI伴学助手及分级难度调整机制等核心功能。为验证系统有效性,以苏州市两所幼儿园59名大班幼儿为研究对象,开展了为期6周的准实验研究,对比本系统与传统Scratch Jr的教学效果。研究发现:实验组幼儿后测编程水平显著高于对照组,且呈持续上升趋势;任务星级与编程成绩呈显著正相关,为系统难度匹配机制的有效性提供了实证依据;质性分析进一步证实,自适应系统提供的情感支架,有效提升了幼儿的任务持续性与情绪稳定性。
- DOI: 10.35534/es.0804074
- Cite: 吴欣颖,姜怡婧,王楠,等.基于DBR的儿童早期自适应编程学习系统构建与实践成效分析[J].教育研讨,2026,8(4):408-414.
1 问题提出
随着人工智能技术的迅速发展,幼儿编程教育受到国际学界与教育界广泛关注,国家《新一代人工智能发展规划》亦对编程教育普及提出导向性要求。编程作为促进幼儿计算思维和问题解决能力的载体备受关注[1],但如何在大规模教学中兼顾个性化需求仍是难题。尽管自适应学习系统将成为实现规模化因材施教的重要路径[2],然而在当前实践中,现有的编程教学系统在“适龄性”和“自适应性”方面存在明显不足,难以满足实际教学需求。
当前的编程工具与幼儿认知发展水平的适配性存在不足。Su、Yang和Li总结近十年幼儿编程研究后发现,尽管Scratch Jr、KIBO等编程工具通过图形化和实体化的设计,极大降低了幼儿的学习门槛,但作为通用编程工具,在动态适配与个性化反馈方面支持有限[3]。针对幼儿的个体差异性,Bati等人强调,若缺失相应的支架支持,幼儿在面对逻辑构建时,极易陷入认知负荷过重的困境[4]。目前,主流编程工具多未内置动态难度调整机制[5],这容易导致能力较弱的幼儿因频遭挫折而产生畏难情绪,能力较强的幼儿因缺乏挑战而陷入倦怠,难以实现有效的个性化学习。
现实教学中“一对多”的教学常态,也使个性化指导陷入困境。幼儿园师生配比有限,导致教师难以对每位幼儿提供即时个性化指导。有研究指出,幼儿操作技能尚不成熟,其编程学习高度依赖于即时反馈和引导。幼儿在编程时易出现操作失误、逻辑不清等问题,教师不得不将大部分精力耗费在低层次的“技术性排障”上,而较难兼顾其高阶思维和情感需求[6]。这种缺乏及时个性化指导的现状,是幼儿编程活动大规模开展的最大瓶颈[7]。
因此,幼儿编程教育面临工具适配性缺失和教师指导缺位的双重矛盾,当前亟需研发一种兼具“认知适宜性”和“自适应”的新型学习系统。该系统不仅要能针对幼儿某一时刻的操作情况动态调整难度,实现工具层面的自适应,还要提供富有关怀的即时反馈,发挥情感支架作用,全方位支持幼儿的编程探索[3,8]。基于上述问题,本研究立足于设计型研究(DBR)范式,开发面向5~8岁儿童的自适应编程学习系统,并通过准实验研究验证系统的有效性。
2 研究方法
2.1 研究设计
采用基于设计的研究(DBR)与准实验研究相结合的两阶段研究设计。第一阶段遵循DBR范式,通过“设计—应用—评估—修正”的三轮迭代循环,开发并优化自适应编程学习系统(AIP Coding)及配套课程。第二阶段采用准实验研究,探究该系统对幼儿编程能力、自我效能感及学习行为的影响,以验证其有效性。
2.2 研究对象
选取苏南地区两所幼儿园大班共59名5~6岁幼儿,所有幼儿均未接受过系统的编程学习。实验组(N=30),男孩15人、女孩15人,使用自适应编程学习系统“AIP Coding”进行学习,对照组(N=29),男孩13人,女孩16人,使用传统Scratch Jr工具进行学习。经统计检验,两组幼儿在年龄、性别比例及家庭背景等人口学变量上无显著差异。本研究仅收集幼儿匿名操作数据,不采集人脸、声音等个人信息,所有数据仅用于本次研究,研究结束后统一删除。本研究所有活动均遵循游戏化原则,不设置强制任务,幼儿可随时停止参与。
2.3 研究流程
实验为期六周,共开展12次教学活动,每周2次,每次30~40分钟。两个组别均按照同一课程流程实施教学:实验组使用自适应编程学习系统进行教学,对照组使用传统Scratch Jr编程工具进行教学;课后幼儿操作时,实验组采用自适应编程学习系统的简易AI伴学助手进行指导,对照组则采用教师一对多现场指导,两组在教师授课内容、课程实施流程上保持一致。
2.4 教学活动设计
课程内容改编自Bers的“CAL Scratch Jr Kindergarten Full Curriculum”[9],共分为三部分:一是基础认知与操作,二是编程逻辑入门,三是综合项目与协作,具体内容如表1所示。
表 1 课程内容
Table 1 Scratch Jr kindergarten curriculum
| 阶段 | 节次 | 教学目标 |
| 基础阶段 | 1~2 | 1.认识界面核心区域; 2.学习“开始—动作—结束”的指令顺序逻辑; 3.学习使用重设角色按钮与撤销键 |
| 初级阶段 | 3~6 | 1.多个动作积木顺序排列; 2.网格作用与参数修改; 3.多种积木类型组合; 4.使用循环积木实现动作的重复执行 |
| 综合阶段 | 7~12 | 1.实现双角色同步运动和多种触发条件; 2.学习并使用高级逻辑排列积木块; 3.掌握场景切换、绘画工具及创意项目构建 |
2.5 测量工具
为确保数据的多元性和客观性,本研究采用量表测验、行为观察和半结构访谈三层工具体系。使用CSA Scratch Jr编程水平量表[10]测量幼儿编程学习成就,该量表包含一系列渐进式编程任务,旨在量化评估幼儿在指令序列、参数调整、逻辑循环等维度的计算思维水平。课堂行为观察量表改编自Fall与McLeod的“Self-Efficacy Scale Teacher Version”[11],重点记录幼儿学习过程中的主动尝试次数、面对失败的情绪反应、求助对象选择等行为指标,客观反映其学习策略和心理品质。结合课堂幼儿参与度、任务完成情况、任务中的求助行为、作品创意及课程中期的编程水平测试,设计针对性访谈提纲,用于评估教学效果与梳理存在问题,了解幼儿的主观学习体验和认知变化。
2.6 数据收集与分析
采用量化与质性相结合的混合研究方法。量化数据方面,以课程中期测验数据为基线参照,结合后测数据,对实验组(30人)与对照组(29人)的能力发展趋势进行追踪。使用SPSS 26.0软件,运用配对样本T检验及重复测量方差分析,重点检验“时间×组别”的交互效应,验证自适应系统对幼儿编程能力提升的有效性。
质性数据层面,涵盖半结构化访谈和课堂行为观察。在每次编程课程结束后,分别对实验组和对照组5名幼儿进行半结构式访谈,聚焦其学习情绪、求助行为及任务体验。同时,利用行为观察表记录12次教学全过程的实时表现。所有质性资料利用三级编码方法进行分析。
3 基于DBR的自适应编程学习系统构建
3.1 设计理念与基本框架
本研究根植于幼儿园真实教学生态,依据设计研究(DBR)范式,围绕“适龄性、个性化支持、低挫败感体验、交互参与”四项核心原则,构建自适应编程学习系统AIP Coding及其配套课程体系。系统架构的核心是内置的“认知—情感”双重自适应逻辑(如图1所示),可实时监测幼儿的操作行为;当识别到幼儿在单一关卡出现认知受阻时,将自动触发双重干预机制:简易AI伴学助手的情感安抚,以及基于分级难度的调整任务星级与难度系数。
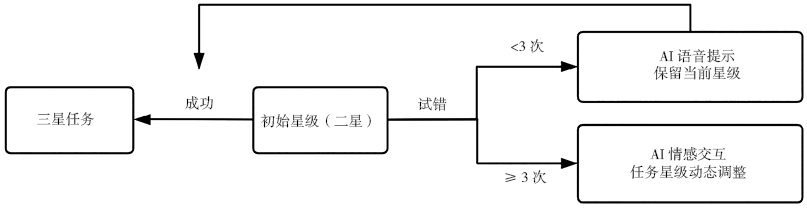
图 1 自适应编程学习系统基本框架
Figure 1 Basic framework of an adaptive programming learning system
3.2 DBR迭代过程与系统优化
本研究通过三轮循环迭代发现,逐步形成适合幼儿园大班幼儿使用的系统原型与课程结构。
3.2.1 第一轮:需求分析与原型构建
(1)需求诊断
基于文献梳理与一线调研,当前幼儿编程教育面临三大问题:资源门槛高,昂贵的学费与设备限制了普及;评价维度单一,仅以任务完成度和耗时作为评估标准,忽略幼儿的合作意愿、情感体验等关键发展维度;指导困境突出,教师难以兼顾每位幼儿的个性化指导需求。
(2)原型设计
针对上述问题,开发符合5~8岁儿童认知特点的自适应编程学习系统,具体功能包括:简易AI伴学助手全程伴学,提供个性化支持及情感交互;智能问答机制,幼儿可通过与AI对话解决基础操作难题,减轻教师的机械性指导压力;分级难度调整机制,构建“二星基准、动态升降”模式,根据幼儿实际操作情况,智能调整为一星或三星任务;挫折缓冲机制,在三次试错后提供降维提示,保护幼儿的学习自信心。
3.2.2 第二轮:交互体验优化与情感逻辑重塑
(1)应用评估
在幼儿园随机选取15名幼儿,进行小范围试用。结合质性观察和访谈发现,系统存在适配性缺陷。包括:反馈同质化,AI无法针对不同类型的错误提供差异化指导;语音识别受限,AI难以精准识别幼儿非标准化的逻辑表达;语言风格成人化,AI指令语过于生硬,缺乏亲和力;“降级”带来的挫败感,过于直观的任务难度降低让幼儿自我效能感受挫。
(2)修正策略
针对上述问题,本研究采取以下优化措施:采用基于规则的自适应提示,实现关键词匹配与基础纠错;重塑语态,结合幼儿语言习惯重新训练AI模型,使其表达更具拟人化、童趣化;构建正向重构机制,将“任务降星”重构为“创意挑战”,将“重试提示”转化为“降低通关门槛的鼓励”,在保护幼儿自尊的前提下实现难度动态匹配。
3.2.3 第三轮:系统稳定优化与生态适配
(1)应用评估
经过上述两轮迭代,再次在幼儿园随机选取15名幼儿进行试用,重点观察AI识别问题的准确性、AI指导语言是否贴合幼儿认知水平、自适应编程学习系统的运行稳定性等情况。观察发现系统存在两个问题:一是误触风险高,幼儿精细动作发展不完善,常因误触导致程序退出或作品丢失;二是管理成本高,教师在课堂上难以逐一登录账号查看幼儿作品,缺乏高效的学情监测手段。
(2)修正策略
针对以上问题,为提升系统的生态适配性,特增加以下功能:增设“自动保存”和“一键重置”功能,降低误触带来的干扰;增加管理者模式,支持教师批量管理账号、可视化查看幼儿作品及学情数据,实现对教学过程的数据化追踪。经过三轮循环迭代(如图2所示),系统实现了从功能性到认知与情感层面的适配,不仅提升了幼儿的自主探究能力和交互体验,也为教师提供了数字化教学管理的有力工具。
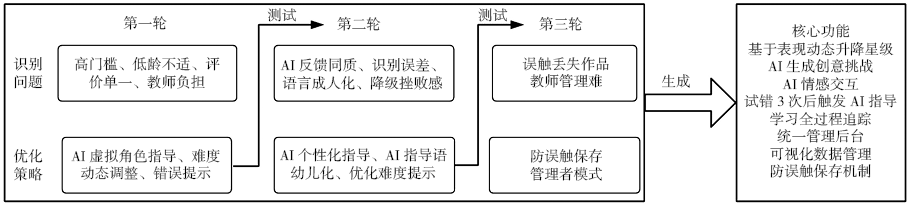
图 2 自适应编程学习系统迭代过程
Figure 2 Adaptive programming learning system iteration process
4 研究结果
4.1 幼儿编程水平整体提升效果
由于幼儿此前均未接受过系统的编程训练,本研究以课程中期测验数据作为基线参照。描述性统计结果(如表2所示)显示,中测阶段,实验组(M=8.76,SD=1.87)与对照组(M=9.10,SD=1.69)得分相近;后测阶段,实验组编程水平上升至9.34(SD=1.97),而对照组得分略有下降(M=7.31,SD=2.42)。
表 2 实验组与对照组中测、后测编程水平描述统计
Table 2 Descriptive statistics of mid-test and post-test programming proficiency for the experimental group and control group
| 组别 | N | 中测(M±SD) | 后测(M±SD) |
| 实验组 | 30 | 8.76±1.869 | 9.34±1.970 |
| 对照组 | 29 | 9.10±1.689 | 7.31±2.423 |
为验证干预效果,采用2(组别:实验组/对照组)×٢(时间:中测/后测)重复测量方差分析(如表3所示)。结果显示,时间×组别交互作用显著,F(1,56)=8.285,p=0.006,η2p=0.129,说明两组幼儿编程能力随时间的发展存在显著差异,即不同的教学支持模式对幼儿编程能力产生了不同影响。简单效应分析显示,实验组后测成绩略有提升且保持稳定,F(1,56)=8.285,p=0.006;而对照组成绩出现明显回落,F(1,56)=3.113,p=0.083。
表 3 实验组和对照组重复测量方差检验
Table 3 Repeated measures ANOVA for experimental and control groups
| SS | DF | MS | F | p | η2p | |
| 时间 | 5.586 | 1 | 5.586 | 3.113 | 0.083 | 0.053 |
| 组别 | 16.690 | 1 | 16.690 | 3.469 | 0.068 | 0.058 |
| 时间×组别 | 39.862 | 1 | 39.862 | 8.285** | 0.006 | 0.129 |
| 误差 | 269.448 | 56 | 4.812 |
注:*表示p<0.05,**表示p<0.01,***表示p<0.001。
4.2 自适应系统的个性化学习支持效果
为验证系统动态任务难度匹配机制的有效性,运用皮尔逊相关系数验证幼儿闯关过程中的平均任务星级与实际编程测验成绩之间的关联。结果显示(如表4所示),课程前期(1~5关),幼儿平均关卡星级(M=2.00,SD=0.458)与中测编程水平(M=8.76,SD=1.869)呈显著正相关,r(28)=0.440,p=0.015,表明初期阶段系统已初步实现任务难度与幼儿能力的适配。课程后期(6~10关),幼儿的平均关卡星级(M=2.31,SD=0.399)与后测编程水平(M=9.34,SD=1.970)的相关系数进一步提升,r(28)=0.599,p<0.001,表明随着课程推进,自适应系统对幼儿认知状态的识别愈发精准,任务难度的动态调整与幼儿实际能力发展呈中等至较强正相关。
表 4 任务关卡星级与编程水平相关性分析
Table 4 Analysis of the correlation between mission star ratings and coding skill level
| 变量配对 | N | 任务星级(M±SD) | 编程测验(M±SD) | r | p |
| 前期:关卡1~5星级×中测平均数 | 30 | 2.00±0.46 | 8.76±1.87 | 0.440 | 0.015* |
| 后期:关卡6~10星级×后测平均数 | 30 | 2.31±0.40 | 9.34±1.97 | 0.599 | 0.000*** |
注:*表示p<0.05,**表示p<0.01,***表示p<0.001。
4.3 儿童系统使用行为与交互表现
基于课堂观察记录和半结构化访谈资料,本研究采用三级编码法,从情绪调节、求助路径迁移、任务坚持性三个核心维度,分析实验组幼儿在自适应系统支持下的使用行为和心理变化。
4.3.1 AI反馈构建心理安全区,降低挫败感
自适应系统通过及时且非评判性的AI语音反馈,为幼儿营造安全的心理环境,提升幼儿在闯关中的情绪稳定性和参与意愿。观察记录显示,幼儿在遭遇认知冲突时表现出更强的情绪稳定性。例如,幼儿在尝试完成“编程猫跳舞”任务时,角色移动轨迹多次出现偏差,但并未表现出常规教学中常见的急躁或拍打设备行为,而是主动点击系统内置的“小助手”图标,听取小助手的语音提示,调整积木顺序与步数,最终取得成功。成功后,他主动向身边幼儿展示屏幕,并说:“我成功了!”(10281601观)。
幼儿对待错误的反应也发生了质的转变,遇到困难时更少出现放弃或哭闹情绪,而是盯着小助手图标或反复听提示音,表现出“再试试”的状态。如编号07的幼儿说:“我先问它(小助手),再问老师。它先帮我看看。”(10220702访)。编号21的幼儿转变更为明显,该幼儿初期遇到错误常会皱眉、快速删除全部积木;在熟悉、依赖自适应系统后,他开始在失败后仔细倾听小助手提示,并跟随提示分步调整,从“即错即弃”逐步转变为“听提示—调积木—再运行”的耐心尝试(10292101观、访),这表明AI角色可以成为缓冲学习压力的有效情感支架。
4.3.2 求助路径从教师依赖向系统辅助迁移
系统提供即时可重复的提示功能,促使幼儿在遇到困难时,从向教师求助转变为优先向AI求助,初步发展了自主解决问题的能力。例如,编号27的幼儿在解决“近大远小”的逻辑任务中,连续两次未能让编程猫正确缩放,她并未举手求助,而是点击AI语音提示,一边听一边移动积木,最终独立完成任务(10292702观)。编号3的幼儿在前几节课中频繁求助教师,常说“老师我不会,老师你教我一下”;而到第6次活动时,遇到问题先是自己重复听AI提示,又点击小助手提问,全程未求助老师,完成任务后自豪地说:“我可以自己解决这个问题!”(10300302观、11040302访)。相比之下,对照组幼儿使用Scratch Jr时,一遇到步数不对或角色不动,就会立刻停止操作并举手等待教师;而实验组幼儿形成了遇错先求助AI的习惯,甚至出现了“你问过小助手了吗”的同伴互助话语。
4.3.3 即时正向反馈强化自我效能感和任务坚持性
通过任务分解、星级挑战与即时正向反馈,自适应系统有效将外部挑战转化为幼儿的内在动机,提升了其在困难情境下的任务坚持性和自我效能感。编号13幼儿在“循环积木编舞蹈”任务中,多次编排角色动作依然不协调,但他没有放弃,而是删除部分积木,听取系统关于“循环次数”的提示,调整参数后再次尝试直至成功,完成后激动地说“我成功了!”,并向教师解释自己如何添加循环积木(10301301观)。编号22幼儿变化极具代表性,从早期的畏难情绪转变为后期的积极尝试。他在前期课程中遇到困难常说“我不想做了”;而到后期课程中,尽管仍认为某些任务“有点难”,但会表示:“我再试一下,应该能行。”(10302201观)。
观察数据显示,在课程后半段的高阶挑战中,尽管任务难度增加,幼儿仍保持较高的完成率,且多数幼儿能在失败后继续点击提示或重新开始,而非离座或切换任务。正如访谈中多名幼儿所言:“我就试了好多次,最后成功了,我觉得自己很厉害。”(10291002访),这说明自适应系统帮助幼儿积累了宝贵的成功体验。
5 讨论
5.1 自适应系统的持续性支持对幼儿编程学习具有重要作用
本研究发现,常规编程教学无法维持幼儿长期的学习成效,对照组幼儿在课程后期出现的能力回落即能说明这一点。当任务维度从单一操作向复杂逻辑迁移时,幼儿在缺乏动态支持的情境下,极易遭遇认知负荷过载,导致前期习得的技能迅速衰退。这一结果实证了马志强等人的理论假设:AI驱动的自适应学习系统之所以能够取得较好的学习效果,关键在于搭建了动态监测的循环机制,使幼儿一直处在不断发展的最近发展区中[12]。本研究构建的自适应学习系统,为幼儿提供了从试错、动态调整到AI指导的动态支架,验证了尚佩瑶和汪存友强调“高适配度干预会延长保持期”的观点[13]。这种动态支架克服了传统一次性指导的短期效应,有效规避经验流失,确保了幼儿计算思维的螺旋式上升。
5.2 个性化难度匹配机制激发幼儿内在学习动机和自我效能感
研究显示,任务星级与后测成绩呈显著正相关,说明个性化难度匹配是激发幼儿自主学习的核心动力。质性访谈验证了这一现象,实验组幼儿在面对难度更高的任务时,更愿意表达“我要再试试一次”的坚持意愿,体现出自适应技术在动机激发上的有效性。依据心流理论,最佳的学习体验发生于挑战和技能的高度平衡区。精准的学习路径和难度推荐可以减少认知负荷,在一定程度上激发内在动机[14]。本研究构建的自适应机制,实际上为每位幼儿动态划定了“最佳挑战区”,以精准教学模式重塑幼儿的参与体验,将外界编程挑战转化成自主学习的动力,促使幼儿突破畏难心理,在良性循环中实现自我效能感的提升。
5.3 情绪友好、低挫败感的提示体系促进幼儿问题解决能力发展
本研究最显著的发现之一,是实验组幼儿从“即错即弃”向“人机协同解决问题”的行为模式转变。这表明,自适应系统的价值不仅体现在认知层面,也体现在情感调节层面。以往研究多聚焦于认知层面的自适应,但Papavlasopoulou等人基于设计的研究强调,儿童在建构主义活动中的情感体验直接决定了知识建构的质量[6]。本研究中,系统内置的简易AI伴学助手及非评判性试错提示,构成了关键的情感支架——正如Su等人的主张,优质的编程课程应当包含社会情感支持系统[3]。当幼儿面临失败时,系统通过非评价性的语音引导,即时建立心理缓冲区,帮助幼儿释放负面情绪,将注意力重新聚焦于问题解决本身。这表明,技术赋能的情感调节,是低龄段编程教育有效开展的重要前提。
6 教育建议
基于上述研究结果与讨论,本研究认为,幼儿园编程教育的实施应超越单纯的技术工具引入,转而深度关注幼儿的学习节奏、个体差异及潜在的情绪与心理需求。
第一,依托自适应技术营造情绪友好型编程探究环境。教育者在遴选编程工具时,应由功能导向转向情感交互设计导向,充分考虑对幼儿情绪体验的支持。建议合理利用自适应系统的即时反馈和虚拟陪伴功能,为幼儿构建高容错、高心理安全感的探索空间。在教学实践中,当幼儿反复试错或停滞不前时,应通过系统的非评判性语音鼓励或教师的及时安抚,帮助幼儿重塑“试错即探索”的积极信念,缓解挫败情绪,增强持续探究的动机。
第二,构建人机协同的精准育人范式,以数据赋能教学决策。教育者应提升数字素养,学会深度解读自适应系统生成的个性化学习报告,精准定位每位幼儿的最近发展区和能力薄弱点。在教学分工上,应逐步确立AI负责基础适配与技能训练、教师聚焦高阶思维引领与情感深度陪伴的协同机制。通过技术有效分担重复性、程序化的指导任务,使教师回归育人核心职能。
第三,强化园本教研与教师专业支持,提升自适应编程教育的实施质量。幼儿园可将智能编程课程纳入园本教研体系,通过集体备课、案例研讨与教学反思等方式,引导教师在真实教学情境中,理解数据反馈背后的幼儿学习状态和情绪变化,避免将系统数据简单等同于学习成效。同时,推动教师从技术使用者转变为课程共建的主体,提升园本智能编程课程的整体实施效能。
参考文献
[1] 边霞.STEM教育、STEAM教育与幼儿编程教育[J].教育导刊,2022(5):5-10.
[2] 顾小清,刘桐.大模型时代的智适应学习研究:进展、实例与展望[J].中国教育信息化,2024,30(5):55-66.
[3] Su J H,Yang W P,Li H.A scoping review of studies on coding curriculum in early childhood:Investigating its design,implementation,and evaluation[J].Journal of Research in Childhood Education,2023,37(2):341-361.
[4] Bati K,Akan A.A systematic literature review regarding computational thinking and programming in early childhood education[J].Education and Information Technologies,2021,27(2):1-24.
[5] Huang Y M,Liang T H,Su Y N,et al.Empowering personalized learning with an interactive e-book learning system for elementary school students[J].Educational Technology Research and Development,2012,60(4):703-722.
[6] Papavlasopoulou S,Giannakos N M,Jaccheri L.Exploring children’s learning experience in constructionism-based coding activities through design-based research[J].Computers in Human Behavior,2019,99:415-427.
[7] Canbeldek M,Isikoglu N.Exploring the effects of “productive children:coding and robotics education program” in early childhood education[J].Education and Information Technologies,2023,28(3):3359-3379.
[8] Abram N.Personalized learning in action:Exploring AI and robotics for early childhood education[C]//Proceedings of the AAAI Conference on Artificial Intelligence,2025,39(28):29561-29563.
[9] Devtech Research Group.Coding as another language for ScratchJr (CAL-Scratchjr):Kindergarten curriculum[EB/OL].(2025-01-01).https://sites.bc.edu/codingasanotherlanguage/curricula/scratchjr-curricula/kindergarten-scratchjr/.
[10] Devtech Research Group.Robotic animals[EB/OL].(2021-09-18).http://ase.tufts.edu/DevTech/tangiblek.
[11] Fall M,Mcleod H E.Identifying and assisting children with low self-efficacy[J].Professional School Counseling,2001,4(5):334-341.
[12] 马志强,张冰儿,Jing N.AI驱动的智适应学习系统设计何以有效?——基于对近十五年来国际前沿研究成果的元分析[J].现代教育技术,2025,35(10):99-107.
[13] 尚佩瑶,汪存友.智适应学习系统的学习效果及其影响因素研究——基于2000—2020年60项实验与准实验研究的元分析[J].数字教育,2021,7(1):45-50.
[14] 牟智佳,岳婷,苏福根.数智化技术何以赋能个性化学习:基于系统性文献综述的探索[J].现代教育技术,2025,35(11):79-88.



